JPEG-over-WebSocket에서 탈출: 로봇 영상을 WebRTC SFU로 1초 지연까지 줄인 설계
기존 관제 시스템의 영상 경로는 JPEG 캡처 이미지를 WebSocket으로 전달하는 방식이었다. 영상 확인 자체는 가능했지만 지연이 커서 원격 제어와 장애 대응에는 활용하기 어려웠다.
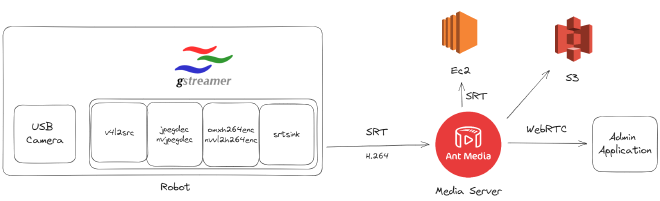
이 글은 로봇 단 송출, 미디어 서버, 웹 수신 경로를 분리해 저지연 스트리밍을 만든 과정을 정리한다.
문제 정의
실시간 영상은 단순 모니터링이 아니라 원격 제어와 안전 대응의 핵심 입력이다. 하지만 기존 방식은 프레임 캡처/인코딩/전송 오버헤드가 커서 지연이 수 초 단위로 발생했다.
운영에서 필요한 수준은 아래와 같았다.
- 원격 조작에 활용 가능한 저지연 영상
- 로봇 대수 증가를 견디는 수평 확장
- 제한된 업링크 대역폭 환경(예: 1Mbps) 대응
- 소수 인력으로 운영 가능한 구조

지연 예산을 먼저 고정
프로토콜 선택 전에 구간별 지연 예산을 먼저 잡았다.
| 구간 | 목표 |
|---|---|
| 로봇 캡처+인코딩 | 120ms 이하 |
| 업링크 전송 | 200ms 이하 |
| 서버 라우팅 | 150ms 이하 |
| 클라이언트 디코드/렌더 | 250ms 이하 |
총합을 1초 이내로 맞추는 것이 목표였다. 이 예산을 두고 나니 각 구간의 최적화 우선순위가 명확해졌다.
프로토콜 의사결정
웹 클라이언트 호환성을 기준으로 후보를 추리면 HLS/MPEG-DASH/QUIC/WebRTC가 남는다. 이 중 HLS/MPEG-DASH는 지연 특성상 제외했고, QUIC과 WebRTC를 비교했다.
당시(2023년) 기준으로는 QUIC 기반 상용 SaaS 선택지가 제한적이었고, WebRTC는 브라우저 호환성/보안/운영 레퍼런스가 충분했다.
결론적으로 클라이언트 수신 경로는 WebRTC로 결정했다.
왜 WebRTC SFU였나
WebRTC 중계 방식은 MCU와 SFU 중 SFU를 선택했다.
- MCU: 트랜스코딩 비용이 커지고 지연이 추가되기 쉬움
- SFU: 스트림 포워딩 중심이라 서버 부하와 지연 측면에서 유리
서비스 구조가 1:N 중심이었기 때문에 SFU가 더 적합했다.

로봇 단 최적화: GStreamer + H.264
로봇 USB 카메라는 JPEG 프레임을 반환하기 때문에, 실시간 스트리밍에는 RAW 변환 후 연속 프레임 코덱으로 재인코딩이 필요했다.
핵심 선택은 아래와 같다.
- 파이프라인 엔진: GStreamer
- 코덱: H.264 (호환성/성능/운영 비용 균형)
- 하드웨어 가속: Jetson/Qualcomm GPU 플러그인 우선
예시 파이프라인:
gst-launch-1.0 v4l2src device=/dev/video0 ! nvjpegdec ! nvv4l2h264enc ! h264parse ! srtclientsink uri=srt://127.0.0.1:9999
중요한 점은 로봇 송출 구간과 웹 수신 구간을 분리했다는 점이다. 로봇→서버 단방향 송출에서는 WebRTC를 강제하지 않고 SRT/RTP 계열을 사용해 시그널링/ICE 절차 부담을 줄였다.
미디어 서버 선정
필수 조건은 아래 다섯 가지였다.
- 웹 클라이언트 SDK
- SRT/RTSP/RTP publish 지원
- 클러스터링(수평 확장)
- ABR 지원
- H.264 지원
후보는 Ant Media, Red5, Janus, Mediasoup였고, 운영 인력 제약을 고려해 관리 도구와 SaaS 가용성을 우선했다. 최종적으로 비용/운영성 균형에서 Ant Media Server를 선택했다.

AWS 배포 전략
AWS 환경에 Ant Media Server를 배포하고, EC2 Auto Scaling + 클러스터 구성을 통해 트래픽 증가 시 수평 확장하도록 설계했다.
즉, 로봇 송출 최적화와 서버 확장 전략을 하나의 운영 경로로 맞췄다.
운영 체크리스트
- TURN 사용량/비용을 리전별로 계측
- bitrate ladder를 네트워크 등급별로 분리
- keyframe 간격과 reconnection 전략을 함께 튜닝
- 장애 시 구간별(인코딩/전송/중계/렌더) 지표를 분리 수집
운영 결과와 한계
실서비스에서는 관제 앱 원격 제어에 사용할 수 있는 지연 수준(약 1초 내외, 당시 운영 환경 기준)을 확보했다. 다만 네트워크 대역폭 제약으로 고화질 영상에는 한계가 있었고, 일부 ML 워크로드에는 추가 튜닝이 필요했다.
정리하면, 이 설계의 핵심은 “단일 프로토콜 고집"이 아니라 로봇 단 처리(GStreamer), 전송 구간(SRT), 웹 배포 구간(WebRTC SFU)을 분리한 데 있었다.
참고 및 인용
참고: WebRTC 표준은 브라우저 실시간 미디어 전송에서 지연/보안/연결 복구(ICE) 모델을 정의한다. WebRTC 1.0: Real-Time Communication Between Browsers
참고: GStreamer 문서는 실시간 미디어 파이프라인 구성과 코덱/플러그인 운용 기준을 제공한다. GStreamer Documentation
참고: SRT는 불안정 네트워크에서 지연/복구 균형을 맞추기 위해 설계된 전송 프로토콜이다. SRT (Secure Reliable Transport)